In order to capture human body movements precisely, with minimal interference and in a non-invasive manner, the DFG-funded Collaborative Research Centre (CRC) 1483 EmpkinS (Empathokinaesthetic Sensor Technology) investigates novel sensor technologies and data-driven methods. The institute of Engineering Design (KTmfk) contributes two subprojects that use digital human models to analyze motion data in a model-based way and to derive information about internal body states. The aim of the first funding period was to establish the basis for improved, person-specific simulation of human movement.
The first subproject (C02) focused on methods for filtering and analyzing multimodal motion data that combine spatial, orientational, surface, and electromyographic signals. Using individualized musculoskeletal models, the project aimed to increase the accuracy and physical consistency of simulation results. To this end, methods for adapting models to individual anthropometric data were developed and validated in pilot studies. In addition, an approach for determining person-specific joint axes was investigated and successfully implemented. A sensitivity analysis demonstrated that the combination of different data types (multimodal approach) leads to significantly more reliable simulation results compared to conventional methods.
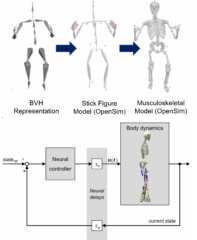
The second subproject (C03) addressed the integration of postural control into digital human models. The research investigated how sensorimotor control – the interaction of visual, vestibular, and somatosensory feedback – can be represented in models and how it differs between patients with Parkinson’s disease and healthy individuals. Impaired postural control is one of the main symptoms of neurodegenerative disorders. Within the project, an extended model was developed that integrates virtual receptors and simulates sensorimotor feedback mechanisms. Experimental studies with healthy participants and Parkinson’s patients identified characteristic movement parameters and differences in control mechanisms responsible for maintaining and restoring balance. Both subprojects have established essential methodological and scientific foundations for precise multimodal motion analysis and advanced predictive simulations during the first funding period. The combination of EmpkinS sensor technology, digital human modeling, and sensorimotor simulation provides a basis for further research in the second funding phase. In the long term, the results open up new perspectives for applications in biomechanics, medical technology, and human-machine interaction, particularly with regard to personalized motion analysis and therapy interventions.